
티스토리 뷰
https://arduinostuff.blogspot.com/2014/05/neo6mv2-gps-module-with-arduino-uno-how.html
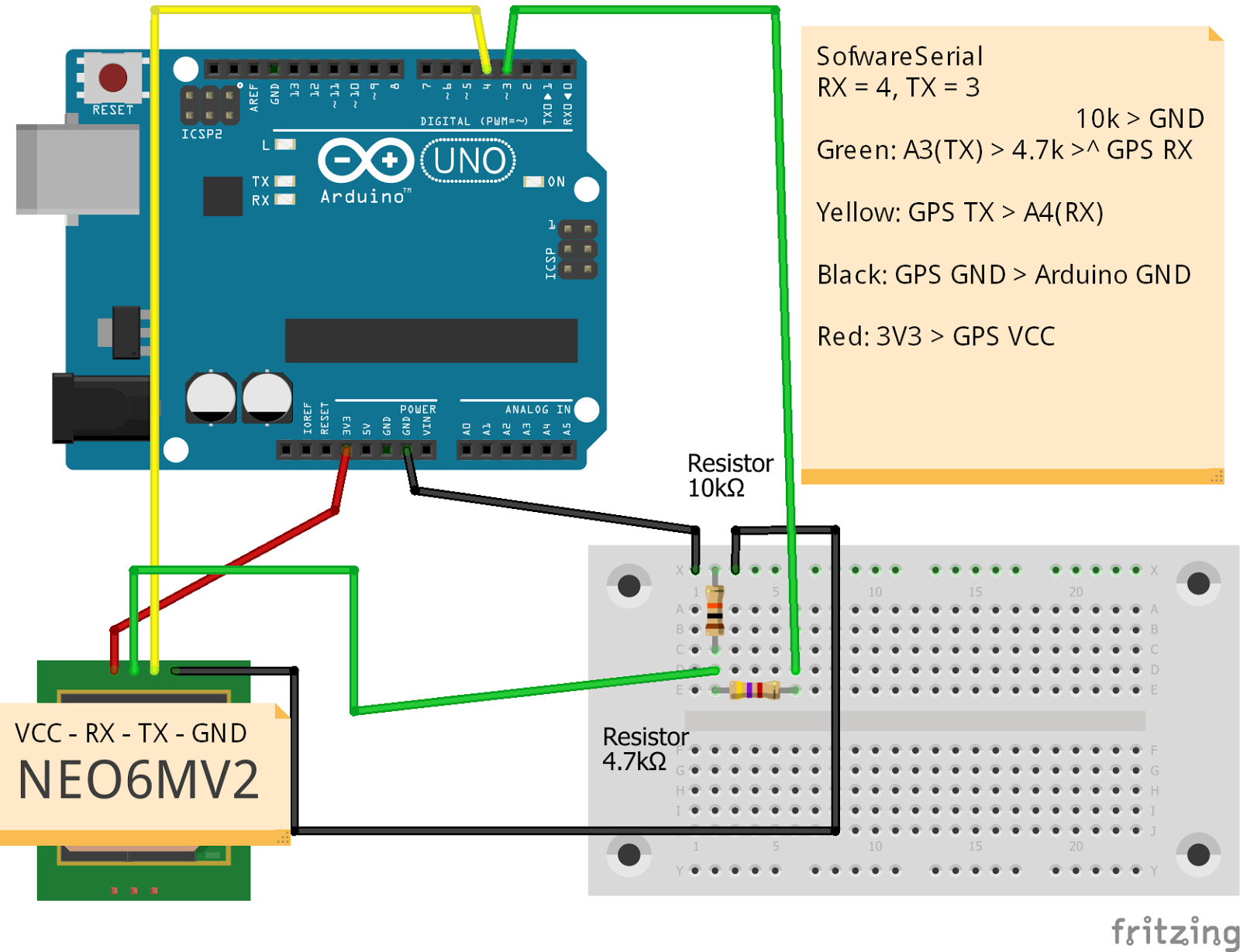
NEO6MV2 GPS Module with Arduino Uno HOW-TO
Introduction Using the NEO6MV2 GPS Module with Arduino is pretty straightforward. This tutorial uses TinyGPS Library by Mikal Hart. The ...
arduinostuff.blogspot.com


소프트웨어

https://codingrun.com/100#google_vignette
여기에서 TinyGPS 라이브러리를 다운로드하세요: https://github.com/mikalhart/TinyGPS/releases/tag/v13 .
예제 폴더에서 "test_with_gps_device.ino"를 엽니다.
이 모듈은 전송 속도 9600을 사용하므로 setup()에서
ss.begin(4800) -> ss.begin(9600)
대체한다.
(아두이노 라이브러리에 있음.)

file -ex 예제를 사용해보자

#include <SoftwareSerial.h>
#include <TinyGPS.h>
/* This sample code demonstrates the normal use of a TinyGPS object.
It requires the use of SoftwareSerial, and assumes that you have a
4800-baud serial GPS device hooked up on pins 4(rx) and 3(tx).
*/
TinyGPS gps;
SoftwareSerial ss(4, 3);
static void smartdelay(unsigned long ms);
static void print_float(float val, float invalid, int len, int prec);
static void print_int(unsigned long val, unsigned long invalid, int len);
static void print_date(TinyGPS &gps);
static void print_str(const char *str, int len);
void setup()
{
Serial.begin(115200);
Serial.print("Testing TinyGPS library v. "); Serial.println(TinyGPS::library_version());
Serial.println("by Mikal Hart");
Serial.println();
Serial.println("Sats HDOP Latitude Longitude Fix Date Time Date Alt Course Speed Card Distance Course Card Chars Sentences Checksum");
Serial.println(" (deg) (deg) Age Age (m) --- from GPS ---- ---- to London ---- RX RX Fail");
Serial.println("-------------------------------------------------------------------------------------------------------------------------------------");
ss.begin(4800);
}
void loop()
{
float flat, flon;
unsigned long age, date, time, chars = 0;
unsigned short sentences = 0, failed = 0;
static const double LONDON_LAT = 51.508131, LONDON_LON = -0.128002;
print_int(gps.satellites(), TinyGPS::GPS_INVALID_SATELLITES, 5);
print_int(gps.hdop(), TinyGPS::GPS_INVALID_HDOP, 5);
gps.f_get_position(&flat, &flon, &age);
print_float(flat, TinyGPS::GPS_INVALID_F_ANGLE, 10, 6);
print_float(flon, TinyGPS::GPS_INVALID_F_ANGLE, 11, 6);
print_int(age, TinyGPS::GPS_INVALID_AGE, 5);
print_date(gps);
print_float(gps.f_altitude(), TinyGPS::GPS_INVALID_F_ALTITUDE, 7, 2);
print_float(gps.f_course(), TinyGPS::GPS_INVALID_F_ANGLE, 7, 2);
print_float(gps.f_speed_kmph(), TinyGPS::GPS_INVALID_F_SPEED, 6, 2);
print_str(gps.f_course() == TinyGPS::GPS_INVALID_F_ANGLE ? "*** " : TinyGPS::cardinal(gps.f_course()), 6);
print_int(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0xFFFFFFFF : (unsigned long)TinyGPS::distance_between(flat, flon, LONDON_LAT, LONDON_LON) / 1000, 0xFFFFFFFF, 9);
print_float(flat == TinyGPS::GPS_INVALID_F_ANGLE ? TinyGPS::GPS_INVALID_F_ANGLE : TinyGPS::course_to(flat, flon, LONDON_LAT, LONDON_LON), TinyGPS::GPS_INVALID_F_ANGLE, 7, 2);
print_str(flat == TinyGPS::GPS_INVALID_F_ANGLE ? "*** " : TinyGPS::cardinal(TinyGPS::course_to(flat, flon, LONDON_LAT, LONDON_LON)), 6);
gps.stats(&chars, &sentences, &failed);
print_int(chars, 0xFFFFFFFF, 6);
print_int(sentences, 0xFFFFFFFF, 10);
print_int(failed, 0xFFFFFFFF, 9);
Serial.println();
smartdelay(1000);
}
static void smartdelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (ss.available())
gps.encode(ss.read());
} while (millis() - start < ms);
}
static void print_float(float val, float invalid, int len, int prec)
{
if (val == invalid)
{
while (len-- > 1)
Serial.print('*');
Serial.print(' ');
}
else
{
Serial.print(val, prec);
int vi = abs((int)val);
int flen = prec + (val < 0.0 ? 2 : 1); // . and -
flen += vi >= 1000 ? 4 : vi >= 100 ? 3 : vi >= 10 ? 2 : 1;
for (int i=flen; i<len; ++i)
Serial.print(' ');
}
smartdelay(0);
}
static void print_int(unsigned long val, unsigned long invalid, int len)
{
char sz[32];
if (val == invalid)
strcpy(sz, "*******");
else
sprintf(sz, "%ld", val);
sz[len] = 0;
for (int i=strlen(sz); i<len; ++i)
sz[i] = ' ';
if (len > 0)
sz[len-1] = ' ';
Serial.print(sz);
smartdelay(0);
}
static void print_date(TinyGPS &gps)
{
int year;
byte month, day, hour, minute, second, hundredths;
unsigned long age;
gps.crack_datetime(&year, &month, &day, &hour, &minute, &second, &hundredths, &age);
if (age == TinyGPS::GPS_INVALID_AGE)
Serial.print("********** ******** ");
else
{
char sz[32];
sprintf(sz, "%02d/%02d/%02d %02d:%02d:%02d ",
month, day, year, hour, minute, second);
Serial.print(sz);
}
print_int(age, TinyGPS::GPS_INVALID_AGE, 5);
smartdelay(0);
}
static void print_str(const char *str, int len)
{
int slen = strlen(str);
for (int i=0; i<len; ++i)
Serial.print(i<slen ? str[i] : ' ');
smartdelay(0);
}
오류:Compilation error: SoftwareSerial.h: No such file or directory
아두이노 나노 33 IoT는 하드웨어 시리얼 포트가 하나뿐이라 SoftwareSerial 라이브러리 대신 다른 방법을 사용해야 합니다.
아두이노 나노 33 IoT에서 GPS 모듈을 연결하려면 아래와 같이 하시면 됩니다:
GPS 모듈의 TX핀을 아두이노의 RX핀(D0)에 연결
GPS 모듈의 RX핀을 아두이노의 TX핀(D1)에 연결
GPS 모듈의 VCC를 3.3V에 연결
GPS 모듈의 GND를 GND에 연결

창 근처나 야외에서 사용
#include <TinyGPS.h>
#include <avr/pgmspace.h>
TinyGPS gps;
void setup()
{
Serial.begin(9600); // GPS 모듈과의 통신 속도에 맞게 조정
Serial.print("Testing TinyGPS library v. "); Serial.println(TinyGPS::library_version());
Serial.println("by Mikal Hart");
Serial.println();
Serial.print("Sizeof(gpsobject) = "); Serial.println(sizeof(TinyGPS));
Serial.println();
Serial.println("Sats HDOP Latitude Longitude Fix Date Time Date Alt Course Speed Card Distance Course Card Chars Sentences Checksum");
Serial.println(" (deg) (deg) Age Age (m) --- from GPS ---- ---- to London ---- RX RX Fail");
Serial.println("--------------------------------------------------------------------------------------------------------------------------------------");
}
static void smartdelay(unsigned long ms)
{
unsigned long start = millis();
do
{
while (Serial.available())
{
char c = Serial.read();
gps.encode(c);
}
} while (millis() - start < ms);
}
void loop()
{
while (Serial.available())
{
char c = Serial.read();
gps.encode(c);
}
gpsdump(gps);
}
static void gpsdump(TinyGPS &gps)
{
float flat, flon;
unsigned long age, date, time, chars = 0;
unsigned short sentences = 0, failed = 0;
static const float LONDON_LAT = 51.508131, LONDON_LON = -0.128002;
print_int(gps.satellites(), TinyGPS::GPS_INVALID_SATELLITES, 5);
print_int(gps.hdop(), TinyGPS::GPS_INVALID_HDOP, 5);
gps.f_get_position(&flat, &flon, &age);
print_float(flat, TinyGPS::GPS_INVALID_F_ANGLE, 9, 5);
print_float(flon, TinyGPS::GPS_INVALID_F_ANGLE, 10, 5);
print_int(age, TinyGPS::GPS_INVALID_AGE, 5);
print_date(gps);
print_float(gps.f_altitude(), TinyGPS::GPS_INVALID_F_ALTITUDE, 8, 2);
print_float(gps.f_course(), TinyGPS::GPS_INVALID_F_ANGLE, 7, 2);
print_float(gps.f_speed_kmph(), TinyGPS::GPS_INVALID_F_SPEED, 6, 2);
print_str(gps.f_course() == TinyGPS::GPS_INVALID_F_ANGLE ? "*** " : TinyGPS::cardinal(gps.f_course()), 6);
print_int(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0UL : (unsigned long)TinyGPS::distance_between(flat, flon, LONDON_LAT, LONDON_LON) / 1000, 0xFFFFFFFF, 9);
print_float(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : TinyGPS::course_to(flat, flon, 51.508131, -0.128002), TinyGPS::GPS_INVALID_F_ANGLE, 7, 2);
print_str(flat == TinyGPS::GPS_INVALID_F_ANGLE ? "*** " : TinyGPS::cardinal(TinyGPS::course_to(flat, flon, LONDON_LAT, LONDON_LON)), 6);
gps.stats(&chars, &sentences, &failed);
print_int(chars, 0xFFFFFFFF, 6);
print_int(sentences, 0xFFFFFFFF, 10);
print_int(failed, 0xFFFFFFFF, 9);
Serial.println();
}
static void print_int(unsigned long val, unsigned long invalid, int len)
{
char sz[32];
if (val == invalid)
strcpy(sz, "*******");
else
sprintf(sz, "%ld", val);
sz[len] = 0;
for (int i=strlen(sz); i<len; ++i)
sz[i] = ' ';
if (len > 0)
sz[len-1] = ' ';
Serial.print(sz);
}
static void print_float(float val, float invalid, int len, int prec)
{
char sz[32];
if (val == invalid)
{
strcpy(sz, "*******");
sz[len] = 0;
if (len > 0)
sz[len-1] = ' ';
for (int i=7; i<len; ++i)
sz[i] = ' ';
Serial.print(sz);
}
else
{
Serial.print(val, prec);
int vi = abs((int)val);
int flen = prec + (val < 0.0 ? 2 : 1);
flen += vi >= 1000 ? 4 : vi >= 100 ? 3 : vi >= 10 ? 2 : 1;
for (int i=flen; i<len; ++i)
Serial.print(" ");
}
}
static void print_date(TinyGPS &gps)
{
int year;
byte month, day, hour, minute, second, hundredths;
unsigned long age;
gps.crack_datetime(&year, &month, &day, &hour, &minute, &second, &hundredths, &age);
if (age == TinyGPS::GPS_INVALID_AGE)
Serial.print("******* ******* ");
else
{
char sz[32];
sprintf(sz, "%02d/%02d/%02d %02d:%02d:%02d ",
month, day, year, hour, minute, second);
Serial.print(sz);
}
print_int(age, TinyGPS::GPS_INVALID_AGE, 5);
}
static void print_str(const char *str, int len)
{
int slen = strlen(str);
for (int i=0; i<len; ++i)
Serial.print(i<slen ? str[i] : ' ');
}
오류2
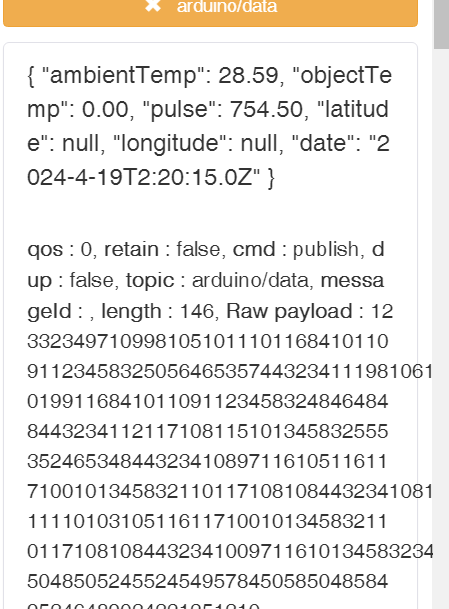
값이 0만 뜸..
(GPT)
Arduino 포럼 토론에서 확인된 것처럼 Arduino Nano 33 IoT는 실제로 Serial1 통신에 핀 D0(RX) 및 D1(TX)을 사용합니다. 이 설정은 하드웨어 UART를 통한 직렬 통신을 허용하여 GPS 모듈( Arduino 포럼 ) 과 같은 주변 장치와의 안정적인 데이터 교환 방법을 제공합니다 .
일부에서는 SoftwareSerial 라이브러리와 같은 소프트웨어 기반 솔루션을 사용하는 장치와의 통신을 위해 핀 5 및 6을 선택할 수도 있지만 SAMD21 마이크로 컨트롤러가 장착된 Nano 33 IoT를 사용하면 SERCOM(직렬 통신) 기능을 사용하여 추가 직렬 인터페이스를 구성할 수 있습니다. 이러한 유연성 덕분에 필요한 경우 핀 0과 1의 사전 정의된 Serial1에만 의존하지 않고도 다양한 핀에 추가 하드웨어 직렬 포트를 생성할 수 있습니다 . ( Arduino 포럼 )
여러 직렬 인터페이스가 필요한 프로젝트의 경우 또는 기본 Serial1 핀이 부적합하거나 이미 사용 중인 경우 SAMD21의 SERCOM 기능을 활용하여 새로운 직렬 포트를 다른 핀에 매핑할 수 있으므로 하드웨어 설계 및 기능에 상당한 다양성을 부여할 수 있습니다 . ( GitHub ) . Serial1에 핀 5와 6을 사용하거나 기본 D0과 D1을 사용하는 것 사이의 선택은 추가 직렬 인터페이스의 필요성과 장치 연결 레이아웃을 포함하여 프로젝트의 특정 요구 사항에 따라 달라질 수 있습니다.
핀아웃과 IoT 애플리케이션에 기능을 활용하는 방법을 포함하여 Arduino Nano 33 IoT에 대한 포괄적인 세부 정보는 Arduino 웹사이트와 사용자가 통찰력과 솔루션을 공유하는 커뮤니티 포럼에서 제공되는 공식 문서와 가이드를 참조하세요. ( Arduino Docs ) ( eTechnophiles ) .
된다.
https://github.com/mikalhart/TinyGPSPlus/releases/tag/v1.0.3a
Release v1.0.3a · mikalhart/TinyGPSPlus
Same as previous release, except version number corrected in TinyGPSPlus.h
github.com
배선
tx선을 5번에 연결
rx선을 6번에 연결
#include <Arduino.h>
#include "wiring_private.h"
#include <TinyGPSPlus.h>
// Define the pins for the GPS module connection
static const int RXPin =5, TXPin = 6;
static const uint32_t GPSBaud = 9600;
// Create a TinyGPSPlus object
TinyGPSPlus gps;
// Setup for the new hardware serial port over SERCOM
Uart myGPS(&sercom0, RXPin, TXPin, SERCOM_RX_PAD_1, UART_TX_PAD_0);
void SERCOM0_Handler()
{
myGPS.IrqHandler();
}
void setup()
{
// Initialize Serial communication at 115200 baud
Serial.begin(115200);
// Initialize Serial1 communication at 9600 baud for the GPS module
myGPS.begin(GPSBaud);
// Assign pins to SERCOM functionality
pinPeripheral(RXPin, PIO_SERCOM_ALT);
pinPeripheral(TXPin, PIO_SERCOM_ALT);
Serial.println(F("DeviceExample.ino"));
Serial.println(F("A simple demonstration of TinyGPSPlus with an attached GPS module"));
Serial.print(F("Testing TinyGPSPlus library v. ")); Serial.println(TinyGPSPlus::libraryVersion());
Serial.println(F("by Mikal Hart"));
Serial.println();
}
void loop()
{
// Display information every time a new sentence is correctly encoded.
while (myGPS.available() > 0)
if (gps.encode(myGPS.read()))
displayInfo();
// If no GPS data is detected after 5 seconds, display a warning.
if (millis() > 5000 && gps.charsProcessed() < 10)
{
Serial.println(F("No GPS detected: check wiring."));
while(true);
}
}
void displayInfo()
{
Serial.println(F("google map link below:"));
if (gps.location.isValid())
{
Serial.print("http://www.google.com/maps/place/");
Serial.print(gps.location.lat(), 6);
Serial.print(F(","));
Serial.println(gps.location.lng(), 6);
}
else
{
Serial.print(F("INVALID"));
}
// Output date and time information
Serial.print(F("Date/Time:"));
if (gps.date.isValid())
{
Serial.print(gps.date.month());
Serial.print(F("/"));
Serial.print(gps.date.day());
Serial.print(F("/"));
Serial.print(gps.date.year());
}
else
{
Serial.print(F("INVALID"));
}
Serial.print(F(" "));
if (gps.time.isValid())
{
if (gps.time.hour() < 10) Serial.print(F("0"));
Serial.print(gps.time.hour());
Serial.print(F(":"));
if (gps.time.minute() < 10) Serial.print(F("0"));
Serial.print(gps.time.minute());
Serial.print(F(":"));
if (gps.time.second() < 10) Serial.print(F("0"));
Serial.print(gps.time.second());
Serial.print(F("."));
if (gps.time.centisecond() < 10) Serial.print(F("0"));
Serial.print(gps.time.centisecond());
}
else
{
Serial.print(F("INVALID"));
}
Serial.println();
}
'Iot' 카테고리의 다른 글
| 아두이노 _ 플로터 _DIY (GRBL CNC Shield + Z axis servo MIGRBL) + UGS (0) | 2024.04.21 |
|---|---|
| 아두이노 나노 33 IOT _ UART ? (0) | 2024.04.19 |
| 아두이노 - GY-302 BH1750 조도센서 (1) | 2024.04.18 |
| 아두이노_온습도센서 : DHT sensor (0) | 2024.04.17 |
| 아두이노_ Micro SD Card_ 비접촉 온도센서(MLX90614) .csv 기록 + OLED 스크린 (0) | 2024.04.12 |
- Total
- Today
- Yesterday
- MQTT
- VR
- zclaw
- DeepLeaning
- OpenClaw
- Java
- Unity
- docker
- AI
- RNN
- opencv
- node.js
- 라즈베리파이
- three.js
- CNC
- TouchDesigner
- Midjourney
- 4d guassian splatting
- 유니티
- opticalflow
- sequelize
- Express
- Arduino
- colab
- MCP
- 후디니
- VFXgraph
- houdini
- Python
- ESP32
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 |